Parameter Setting of WISE Servo Drive (Pulse-type)
Pr528
Name: LED initial status
Value: 6
Description: Monitor if the number of sent and received pulses is correct by setting this parameter.
In Weihong control system, the correct quantity of pulse sent by control card is detected by pulse inspection in order to determine whether there is electrical interference.
Pr008
Name: Command pulse No. per motor circle
Value: 0
Description:
0: Parameters Pr009 and Pr010 are valid.
The other values: Calculate the command pulse count for per revolution of servo motor, according to the formula:
Command pulse count for per revolution of servo motor = screw pitch / ( pulse equivalence * mechanical reducer ratio)E.g. Screw pitch 5mm, pulse equivalence 0.001mm/p: Pr008 = 5000.
About the relationship among Pr008, Pr009 and Pr010, see Relationship among Pr008, Pr009 and Pr010.
Pr009 and Pr010
Name: 1st numerator of command pulse frequency division/ multiplication
Value: Need calculation
Typical value: Screw pitch 5 mm, encoder resolution 10000, deceleration ratio 1:1, pulse equivalent 0.001 mm/p:
Pr009=10000 Pr010=pitch 5mm/ pulse equivalent 0.001mm=5000 Pr009/Pr010=10000/5000=2/1
Description: About the relationship among Pr008, Pr009 and Pr010, see Relationship among Pr008, Pr009 and Pr010.
Relationship among Pr008, Pr009 and Pr010
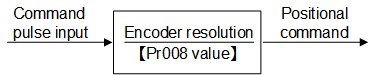
Pr008=1~220, Pr009 and Pr010 have no effect
This operation is processed according to the value of Pr008 as follows:
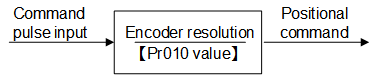
Pr008=0, Pr009=0, Pr010=1~230
This operation is processed according to set value of Pr010 as follows:
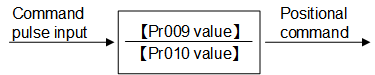
Pr008=0,Pr009=1~230,Pr010=1~230
This operation is processed according to set value of Pr009 and Pr010 as follows:
Pr011
Name: Output pulse No. per motor circle
Value: 2500 (default)
Typical value: When pulse equivalent 0.001mm/p, deceleration ratio 1:1, pitch 10mm/p, this parameter is set to 2500; When pitch 5mm/p, it is set to 1250.
Pr100
Name: 1st position loop gain
Value: 480 (default)
Unit: 0.1/s
Description: It is set according to the actual situation.
Pr101
Name: 1st velocity loop gain
Value: 270 (default)
Unit: 0.1Hz
Description: It is set according to the actual situation.
Pr102
Name: 1st velocity loop integrated time constant
Value: 210 (default)
Unit: 0.1ms
Description: It is set according to the actual situation.