Execute Return to Mechanical Origin or Set Datum
When installing the software, if it is configured as bus, it can return to the mechanical origin or set the datum; If it is configured as non bus, it can only execute back to the mechanical origin. Take the bus as an example.
Encoder type:
Incremental encoder:Execute Return to Mechanical Origin
Absolute encoder:Set Datum
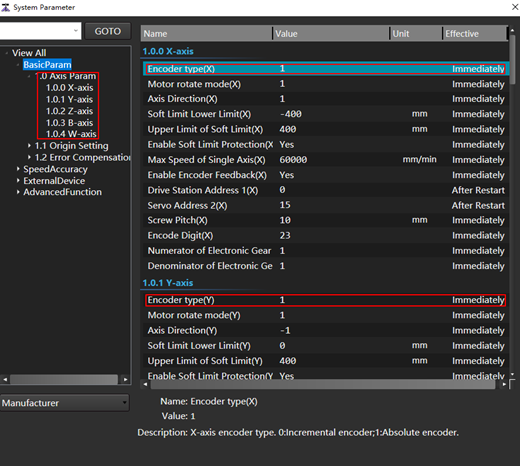
The encoder type can be set by finding the parameter Encoder Type in System Parameter.
Execute Return to Mechanical Origin
The mechanical coordinate origin of the machine tool is the mechanical origin, or called the mechanical zero point. The mechanical coordinate system of the machine tool is unique and has been determined when the machine tool leaves the factory.
Return to the mechanical origin to synchronize the mechanical coordinate system of the system with the mechanical coordinate system of the machine tool, so you must return to the mechanical origin before machining.
Note
When B-axis returns to the mechanical origin, only one signal is detected and the chuck clamping state is detected before Y/B returns to the origin.
Prerequisite:
Before returning to the mechanical origin, ensure that all servo alarms have been cleared.
Operation Steps:
In the menu bar, click Machining →
 → Homing Setting to open the To Machine Origin dialog box:
→ Homing Setting to open the To Machine Origin dialog box: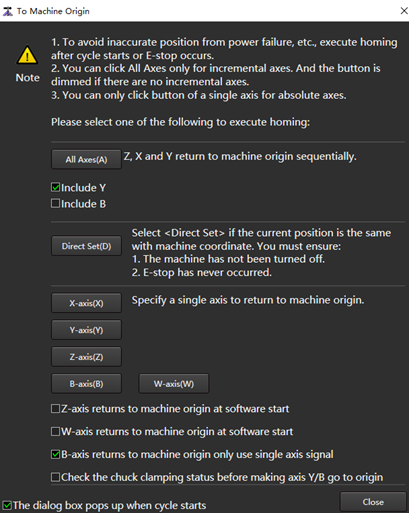
The dialog box pops up after the software starts by default. If you need to cancel the setting, uncheck This Dialog Box Pops Up when Cycle Starts.
(Optional: ) Check the following parameters as required:
- The B-axis returns to the machine origin only use single axis signal: if checked, the B-axis returns to the mechanical origin with only one position signal of the B-axis mechanical origin.
- Check the chuck clamping state before making axis Y/B go to origin: if checked, check chuck clamping state before Y/B returns to the original point, and do not return to the mechanical original point when the chuck is clamped.
Select one of the following methods:
Click All Axes to automatically return to the mechanical origin in the order of Z-axis first, then X, Y, W axis.
In the machine tool control bar, click
 to execute all axes return to mechanical origin.
to execute all axes return to mechanical origin.Click the button corresponding to a single axis to return to the mechanical origin for each axis.
In the machine tool control bar, click
 to execute Z-axis return to mechanical origin.
to execute Z-axis return to mechanical origin.If the mechanical coordinate of the current position is consistent with the actual mechanical coordinate of the machine tool, and the machine tool has not been turned off or has not experienced any abnormal conditions such as servo alarm, click Direct Set to set the current point as the mechanical origin.
In the machine tool control bar, click
to select the method of returning to the mechanical origin.
After executing returning to the machine origin, sign  appears in front of each axis in the machine tool control bar.
appears in front of each axis in the machine tool control bar.
Set Datum
The motor of absolute encoder can set the current cutting head position as the mechanical origin position through reference.
Prerequisite:
The encoder type of the corresponding axis in the system parameters is 1: absolute value.
Operation Steps:
In the menu bar, click Machining →
 .
.Select one of the following methods:
Click All Axes to automatically set the datum.
Click the button corresponding to a single axis to set the datum for each axis.
You can select Cancel(All) to cancel datum setting.
After setting datum, sign appears in front of each axis in the machine tool control bar. And after starting the software or releasing E-stop, the system automatically updates the machine coordinate and feedback coordinate according to feedback pulses to make the current machine coordinate match with the actual coordinate.