Reset the Encoder
Resetting the encoder refers to initializing the absolute-type encoder.
If the data that has been recorded by the absolute-type encoder is different from the actual position, reset the encoder to unify two of them. After resetting the encoder, revolutions of absolute-type encoder will be cleared to zero, and encoder alarm will be removed as well.
Please note that when the servo is enabled, you cannot reset the encoder. Disable the servo first, then reset the encoder.
NOTE: The servo enabling signal is absent in M2 type servo drives.
To reset the encoder, please do the following:
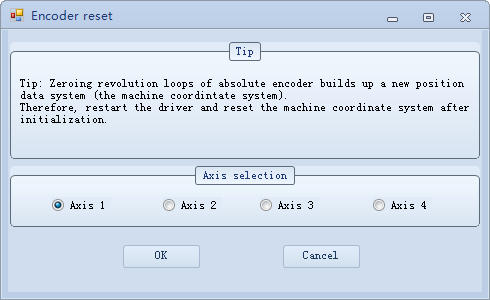
With the servo disabled, click Other → Reset Encoder to open a confirmation dialog box, as shown below:
In the scenario of multi-axis application of iMotion:
In the scenario of single-axis application of iMotion:

Click OK.
The system will automatically initialize the absolute encoder.