驱动器接线图
通过阅读这部分内容,您可以快速了解如何将维宏 DB15 驱动器接口与不同伺服电机相连。
使用的控制模式不同,驱动器接线不同。请先了解 驱动器接口定义 后,参考以下驱动器的接线图进行接线:
- 驱动器接线图(位置环控制模式)
- 驱动器接线图(速度环控制模式)(仅针对激光行业)
驱动器接口定义
维宏伺服驱动器接头插座为 DB15 三排孔,接口定义区别如下:
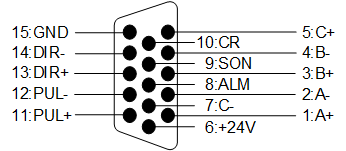
位置环控制模式下驱动器接口
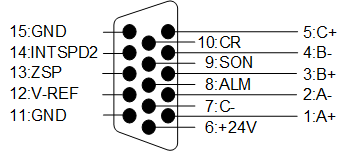
速度环控制模式下驱动器接口
接口定义说明如下:
| 信号名 | 定义 | 输入输出 | 说明 |
|---|---|---|---|
| A+, A- | 编码器A相反馈信号 | 输入 差分信号传输方式 |
接收来自驱动分频器(等效于RS422)的A相编码器信号的差分输出。 |
| B+, B- | 编码器B相反馈信号 | 输入 差分信号传输方式 |
接收来自驱动分频器(等效于RS422)的B相编码器信号的差分输出。 |
| C+, C- | 编码器C相反馈信号 | 输入 差分信号传输方式 |
接收来自驱动分频器(等效于RS422)的C相编码器信号的差分输出。 |
| ALM | 驱动器报警信号 | 输入 | 当驱动器检测到故障时,此输出(晶体管)切断。 |
| SON | 伺服ON信号 | 输出 | 用于启闭伺服马达(通电/非通电状态)。当此信号连接 COM 时,动态制动器将释放,驱动器允许工作(伺服使能)。 |
| CLR | 驱动器报警清除信号 | 输出 | 用于解除报警/警告状态。 |
| PUL+, PUL- | 脉冲输出 | 输出 差分信号传输方式 |
- |
| DIR+, DIR- | 方向输出 | 输出 差分信号传输方式 |
- |
| INTSPD2 | 内部指令速度选择2 | 输出 | - |
| ZSP | 零速箝位检测信号 | 输出 | 在零速箝位检测状态下,将输出晶体管置于 ON。 |
| V-REF | 模拟速度指令 | 输出 | - |
| +24V, GND | DC24V 电源 | 输出 | 与驱动器连接。 |
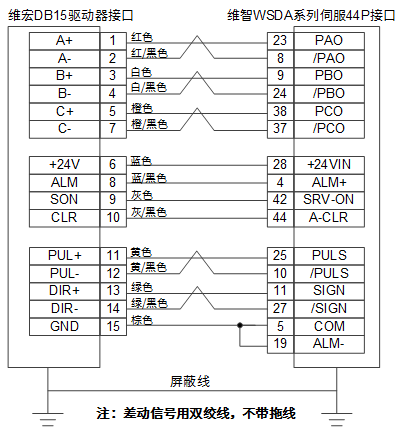
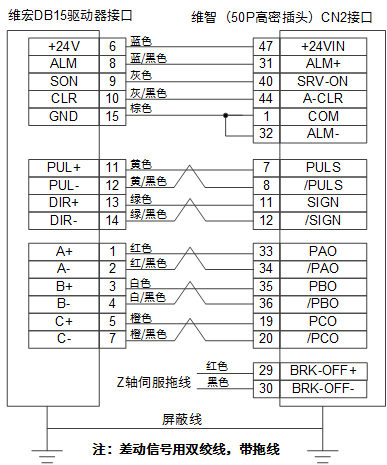
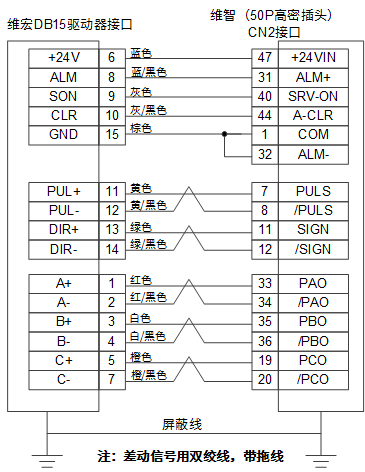
驱动器接线图(位置环控制模式)
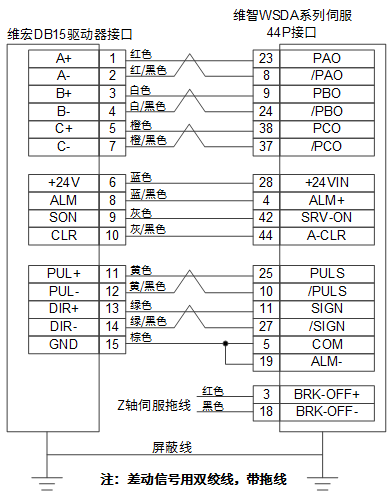
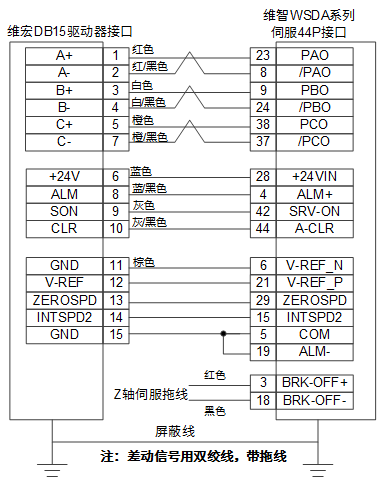
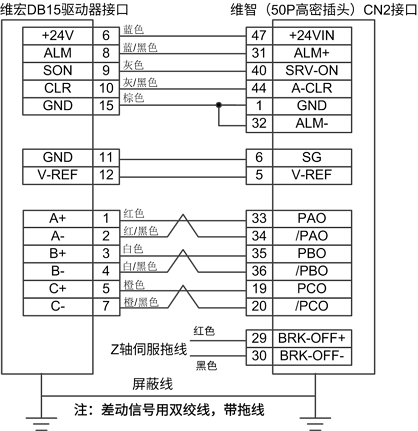
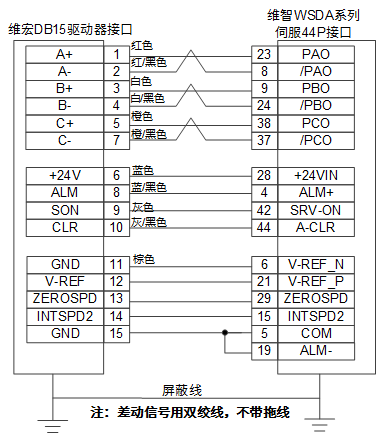
维智系列伺服驱动器
接线图如下:
带拖线(44P接口)
不带拖线(44P接口)
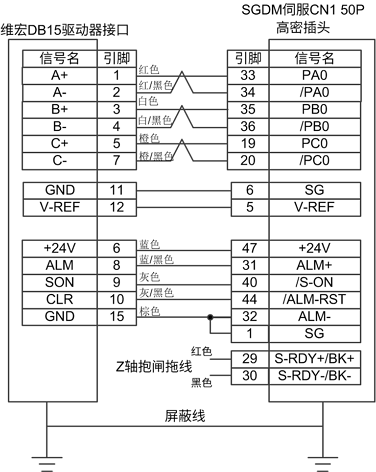
带拖线(50P高密插头)
不带拖线(50P高密插头)
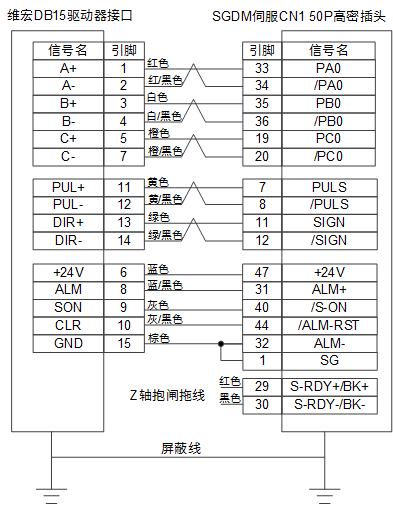
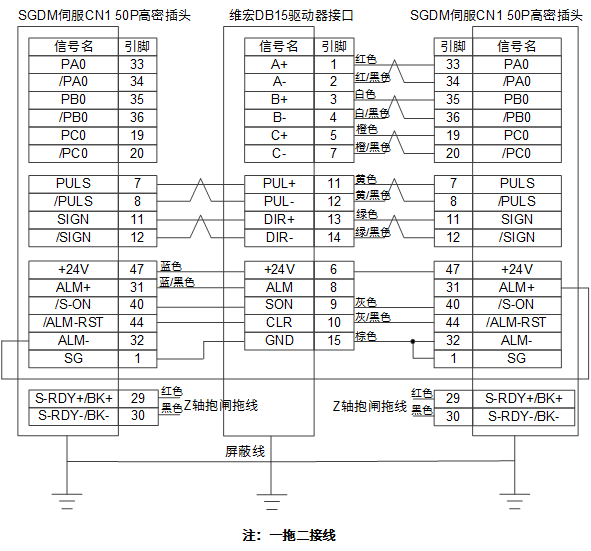
安川Σ-Ⅱ/Σ-Ⅴ/Σ-7 交流伺服驱动器
接线图如下:
一般接线
一拖二接线
管切专用一拖二接线

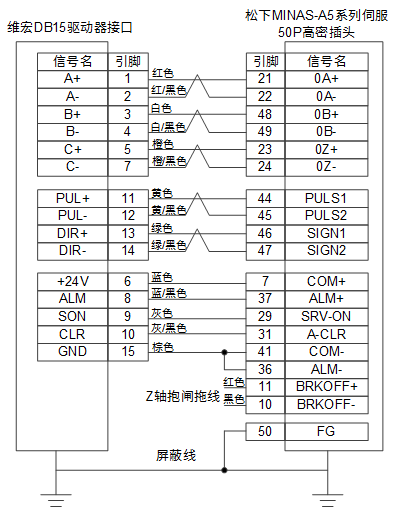
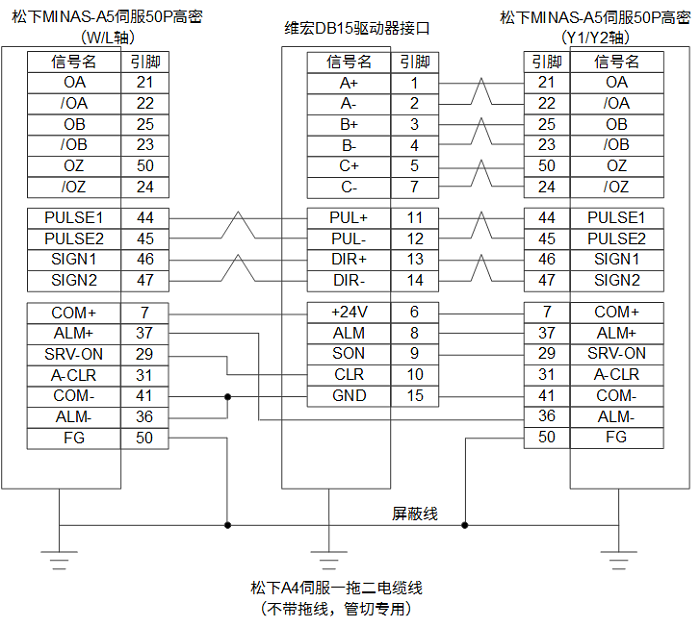
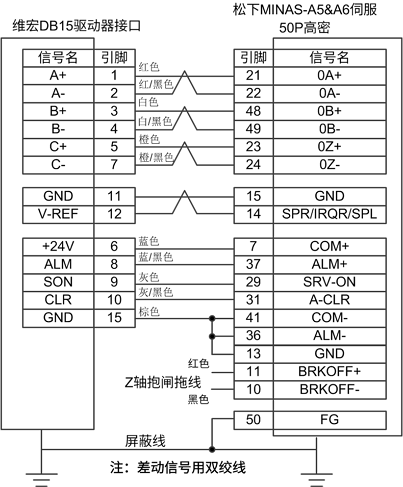
松下交流伺服驱动器
接线图如下:
一般接线
管切专用一拖二接线
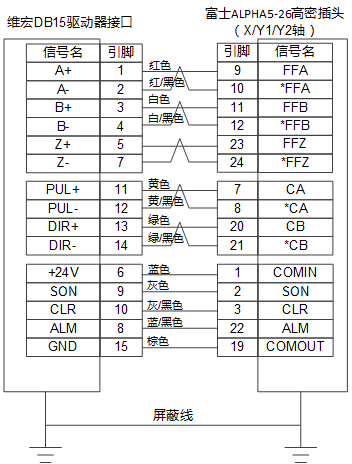
富士伺服驱动器
接线图如下:
一般接线

管切专用一拖二接线

富士alpha5 plus(X/Y1/Y2轴)
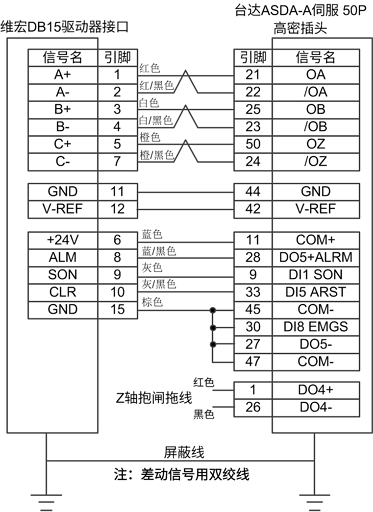
台达伺服驱动器
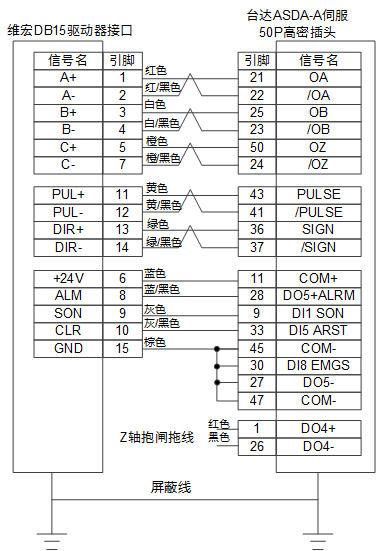
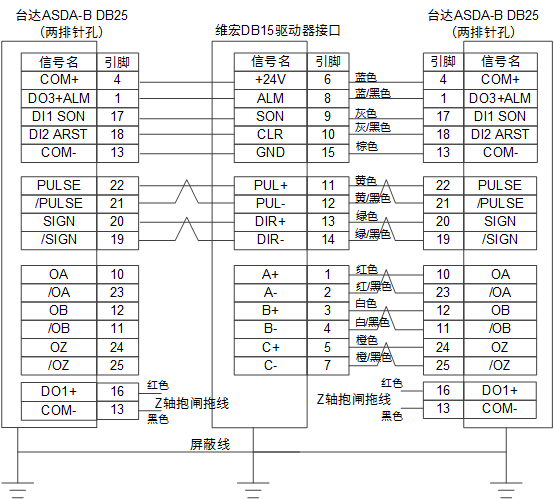
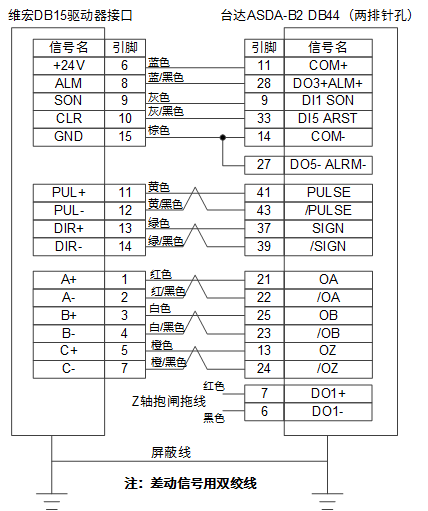
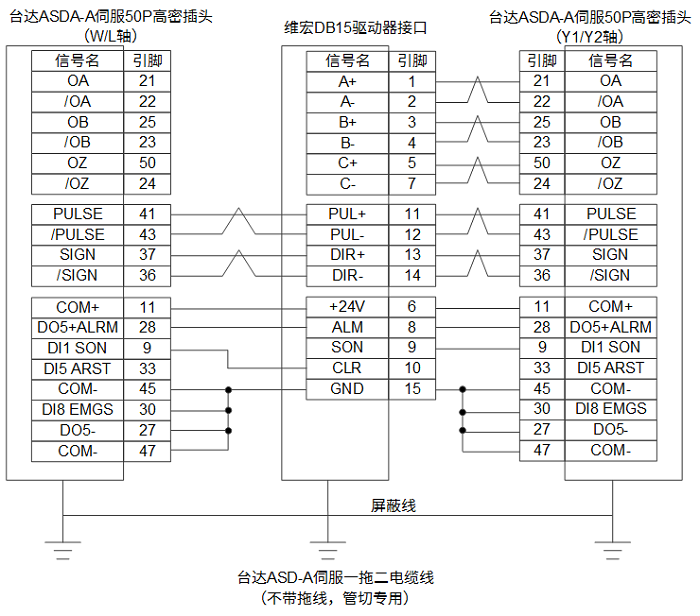
台达 ASDA-A、ASDA-B、ASDA-B(一拖二)、ASDA-B2 型伺服驱动器所用电缆线相同。
接线图如下:
ASDA-A型
ASDA-B型

ASDA-B型(一拖二)
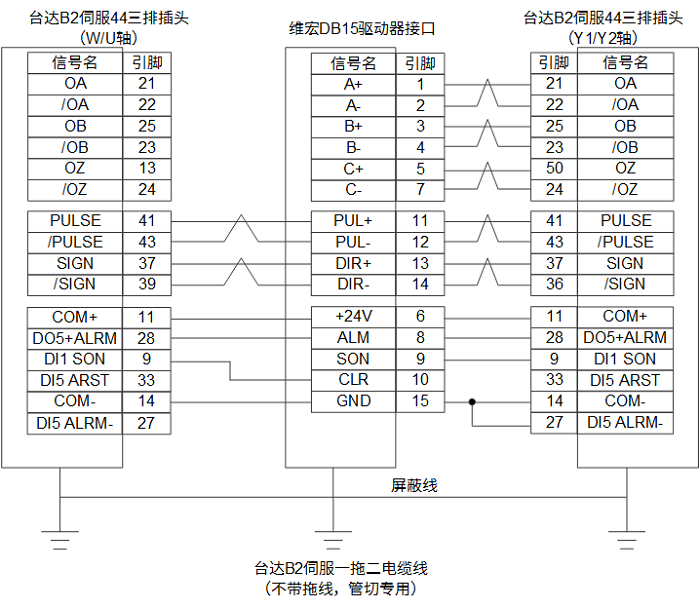
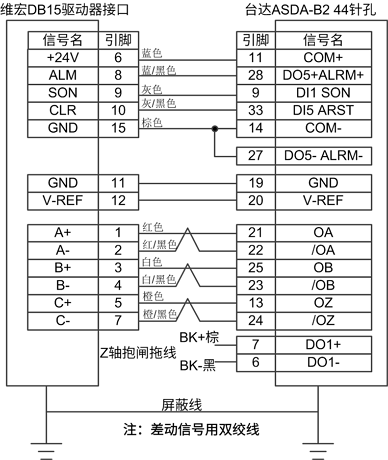
ASDA-B2型
管切专用 ASDA-A型(一拖二)
管切专用 ASDA-B2型(一拖二)
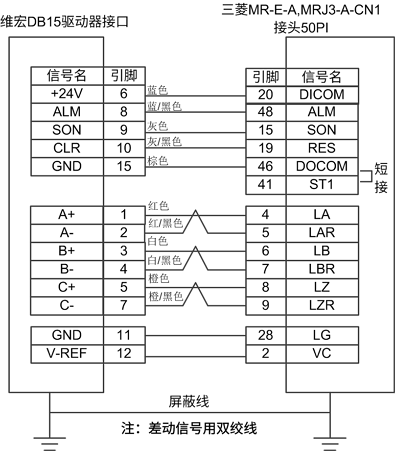
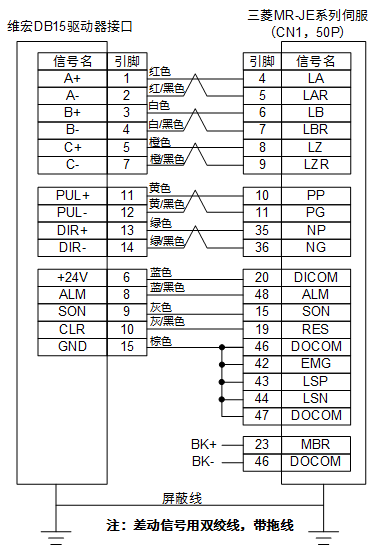
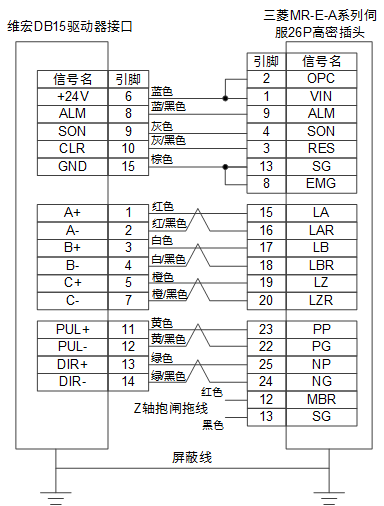
三菱伺服接线图
接线图如下:
MR-JE型(不带拖线)

MR-JE型(带拖线)
MR-E型
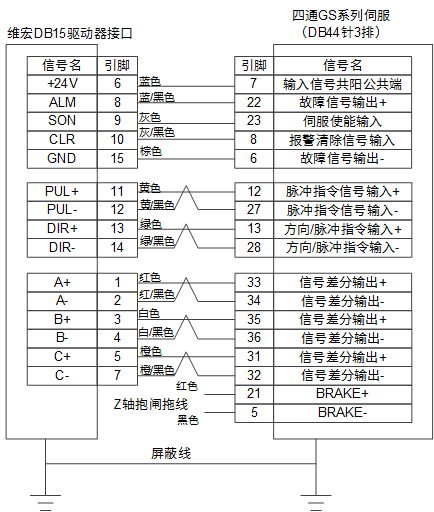
四通GS系列伺服接线图
接线图如下:
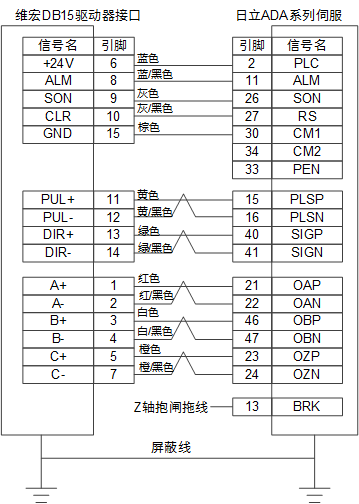
日立伺服接线图
接线图如下:
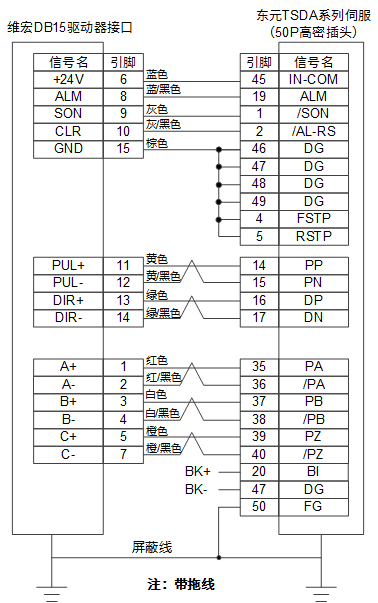
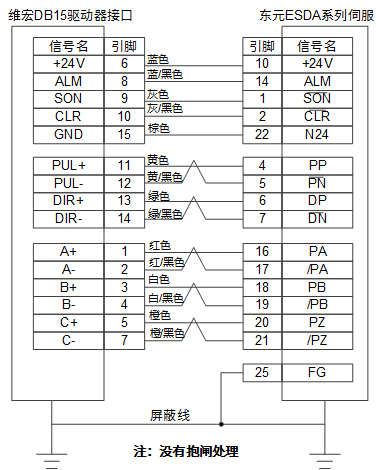
东元伺服接线图
接线图如下:
TSDA系列
ESDA系列
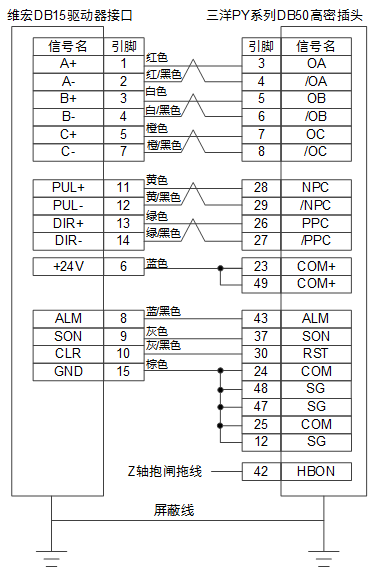
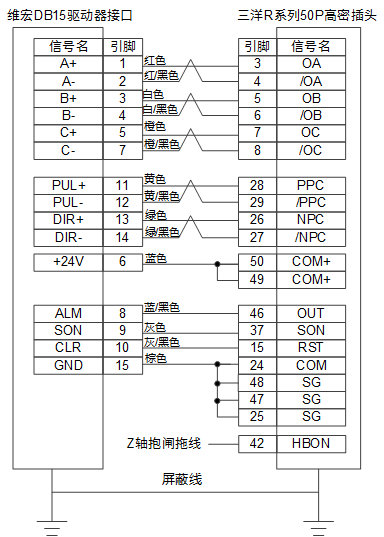
三洋伺服接线图
接线图如下:
PY系列
R系列
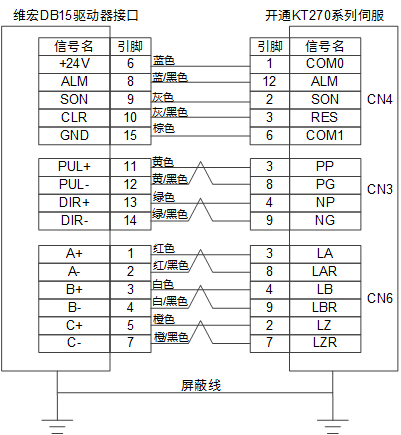
开通KT270系列伺服接线图
接线图如下:
驱动器接线图(速度环控制模式)
维智系列伺服驱动器
接线图如下:
带拖线(44P接口)
带拖线(50P高密插头)
不带拖线(44P接口)
安川 Σ-5&Σ-7交流伺服驱动器
接线图如下:
富士伺服驱动器
接线图如下:
一般接线图

参数说明:
PA1-01:
- 名称:控制模式选择
- 设定值:1
- 说明:速度控制。
PA1-08:
- 名称:每旋转1周的输出脉冲数
- 设定值:2500,
- 说明:脉冲当量为0.001,且没有减速机的情况下,螺距为10mm时,此参数设置为2500;螺距为5mm时,此参数设置为1250。
PA3-31:
- 名称:速度指令刻度。
- 设定值:10,
- 说明:10V对应的额定转速。
PA3-01:
- 名称:CONT1信号分配。
- 设定值:1,
- 说明:伺服ON。
PA3-26:
- 名称:CONT常时有效1。
- 设定值:2,
- 说明:正转指令。
富士alpha5 plus(Z轴)

禾川伺服驱动器
接线图如下:

参数说明:
P00.01:
- 名称:控制模式选择
- 设定值:1
- 说明:速度控制
P00.02:
- 名称:自动调整
- 设定值:1
- 说明:设置为 0,实时自动调整功能无效;设置为 1,标准模式,无增益切换(先设定自动调整,运行一段时间,Z轴无过冲,无异响,建议将该值改为10)
P00.03:
- 名称:刚性等级
- 设定值:19(建议值)
- 范围:0~31
P00.14:
- 名称:每旋转1周的输出脉冲数
- 设定值:2500
- 说明:脉冲当量为0.001,且没有减速机的情况下,螺距为10mm时,此参数设置为2500;螺距为5mm时,此参数设置为1250
P03.00:
- 名称:速度指令来源
- 设定值:1
- 说明:SPR(默认AI1)
P05.00:
- 名称:AI1最小输入
- 设定值:-10
- 范围:-10.00V~10.00V
P05.01:
- 名称:AI1最小输入对应转速
- 设定值:-100
- 说明:100%速度对应系统最大转速
P05.02:
- 名称:AI1最大输入
- 设定值:10
- 范围:-10.00V~10.00V
P05.03:
- 名称:AI1最大输入对应转速
- 设定值:100
- 说明:100%速度对应系统最大转速
P05.04:
- 名称:AI1零点微调
- 单位:1mv
- 范围:-500~500
P05.14:
- 名称:AI设定100%转速
- 设定值:3000
- 范围:0rpm~9000rpm
P04.01:
- 名称:DI1端子功能选择。
- 设定值:1
- 说明:伺服使能。
P04.11:
- 名称:DI1端子逻辑选择
- 设定值:0
- 说明:设置为 0,低电平有效;设置为 1,高电平有效
P04.02:
- 名称:DI2端子功能选择
- 设定值:2
- 说明:报警复位信号
P04.12:
- 名称:DI2端子逻辑选择
- 设定值:0
- 说明:设置为 0,低电平有效;设置为 1,高电平有效
P04.28:
- 名称:D08端子功能选择
- 设定值:2
- 说明:故障输出
P04.38:
- 名称:D08端子逻辑选择
- 设定值:1
- 范围:设置为 0,常开触点;设置为 1,高常闭触点
松下交流伺服驱动器
接线图如下:
台达伺服驱动器
台达 ASDA-A、ASDA-B2 型伺服驱动器所用电缆线相同。
接线图如下:
ASDA-A型
ASDA-B2型
参数说明:
P1-00:
- 名称:驱动器状态显示
- 范围:-
- 设定值:2
- 说明:设置此参数来进行脉冲数的接发是否正确,在维护控制系统里,通过脉冲监测,来监测通讯卡发出脉冲是否正确,来判断出是否存在电气干扰问题。
P1_00:
- 名称:设定外部脉冲输入形式
- 范围:ZYX
- 设定值:102
- 说明:X=2:设定外部脉冲输入形式为脉冲+方向;Z=1:负逻辑
P1_01:
名称:控制模式设定
范围:ZYX1X0
设定值:2
说明:
- Z=0:控制模式切换时DIO保持原设定值
- Y=0:从负载方向看,逆时针正转,设为1反向
- X1X0=02:设定控制模式为速度控制
P1_44:
- 名称:电子齿轮比分子N1
- 范围:1~32767
- 设定值:-
- 说明:N1/M=编码器脉冲数 * 4 * 脉冲当量 * 机械减速比/螺距。典型值:编码器脉冲数4000,脉冲当量0.001,螺距5mm,机械减速比1。N1/M=4000 * 4 * 0.001/5=32/1,N1设定32,M设定1,未使用多段电子齿轮比,不用设P2_60~P2_62
P1_45:
- 名称:电子齿轮比分母M
- 范围:1~32767
- 设定值:-
- 说明:N1/M=编码器脉冲数 * 4 * 脉冲当量 * 机械减速比/螺距。典型值:编码器脉冲数4000,脉冲当量0.001,螺距5mm,机械减速比1。N1/M=4000 * 4 * 0.001/5=32/1,N1设定32,M设定1,未使用多段电子齿轮比,不用设P2_60~P2_62
P1_46:
- 名称:检出器输出脉冲数设定
- 范围:20~40000
- 设定值:-
- 说明:脉冲当量为0.001,且没有减速机的情况下,螺距为10mm时,此参数设置为10000;螺距为5mm时,此参数设置为5000
P1_40:
- 名称:仿真速度指令最大回转速度
- 范围:0~10000
- 设定值:-
- 说明:
- 在速度模式下,模拟速度指令输入最大电压(10V)时的回转速度。假设设定3000,外部电压输入10V时,即表速度控制命令为3000r/min。5V则表示速度控制命令为1500r/min。速度控制命令=输入电压值*设定值/10。
- 在位置或扭矩模式下,模拟速度限制输入最大电压(10V)时的回转速度。速度限制命令=输入电压值*设定值/10。对应软件随动参数:速度增益。例如P1_40设置3000,对应的速度增益为300
P2_10:
- 名称:数字输入脚DI1功能设定
- 范围:X2X1X0
- 设定值:101
- 说明:X1X0=01:设定数字输入DI1为SON,对应CN1的9脚;X2=1:设定输入DI1为常开a接点
P2_15:
- 名称:数字输入脚DI6功能设定
- 范围:X2X1X0
- 设定值:0
- 说明:驱动器出厂默认设置DI6、DI7为常闭限位信号输入,未接CN1的32、31脚时驱动器无法运转
- X2=0:设定输入DI6、DI7为b常闭接点
- X1X0=00:不使用驱动器的限位输入
P2_16:
- 名称:数字输入脚DI7功能设定
- 范围:X2X1X0
- 设定值:0
- 说明:驱动器出厂默认设置DI6、DI7为常闭限位信号输入,未接CN1的32、31脚时驱动器无法运转
- X2=0:设定输入DI6、DI7为b常闭接点
- X1X0=00:不使用驱动器的限位输入
P2_17:
- 名称:数字输入脚DI8功能设定
- 范围:X2X1X0
- 设定值:0
- 说明:不使用外部EMG紧停输入
P2_18:
- 名称:数字输出脚D01功能设定
- 范围:X2X1X0
- 设定值:108
- 说明:D01对应引脚为6、7,在Z轴用做钳位刹车信号
- X2=0:设定D01输出为a常开接点,设为0为b常闭接点
- X1X0=08:设定6、7脚分别为BK-、BK+
P2_22:
- 名称:数字输出脚D05功能设定
- 范围:X2X1X0
- 设定值:7
- 说明:D05对应引脚为28、27,伺服报警信号
- X2=0:设定D05输出为b常闭接点
- X1X0=07:设定28、27脚分别为ALRM+、ALRM-
汇川伺服驱动器
接线图如下:

参数说明:
H0200:
- 名称:控制模式
- 设定值:0
H0203:
- 名称:输出脉冲相位
- 设定值:1
H0206:
- 名称:故障停止零速停止
- 设定值:0
H0407:
- 名称:有效输出高电平
- 设定值:1
H0408:
- 名称:抱闸
- 设定值:9
H0600:
- 名称:ALI
- 设定值:1
H0815:
- 名称:惯量比
- 设定值:2.5左右
H0900:
- 名称:刚性模式
- 设定值:1
H0901:
- 名称:刚性等级
- 设定值:18
H0502:
- 名称:每圈脉冲数
- 设定值:10000
三菱伺服驱动器
接线图如下: