接线
该部分介绍 NK530M 硬件接线所需的示意图、可支持的信号类型以及 Lambda 控制器的接口。
示意图
该部分介绍 NK530M 尺寸图、连接示意图以及电源开关电气原理图。
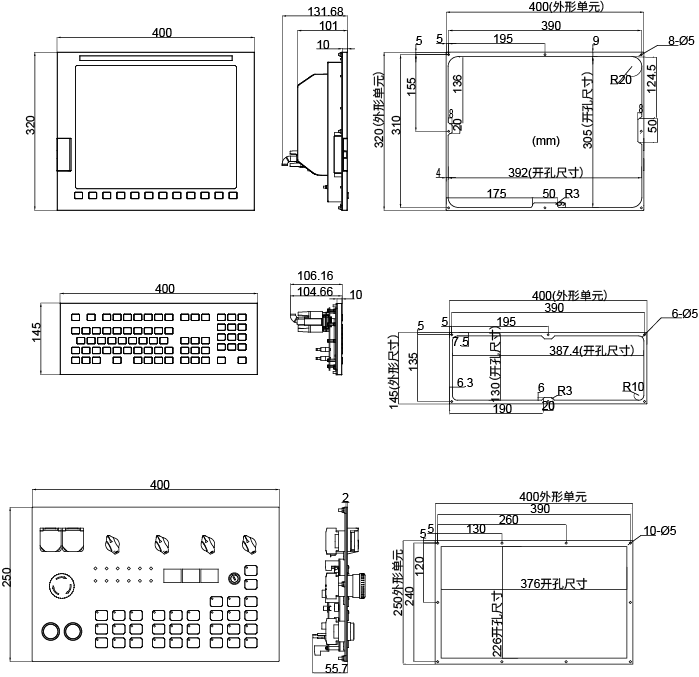
尺寸图(单位:mm)
尺寸图如下所示:
连接示意图
NK530M 连接示意图包括总线控制系统与非总线控制系统的连接示意图,两种系统连接示意图类似,以总线控制系统连接示意图为例:
总线控制系统连接示意图如下所示:

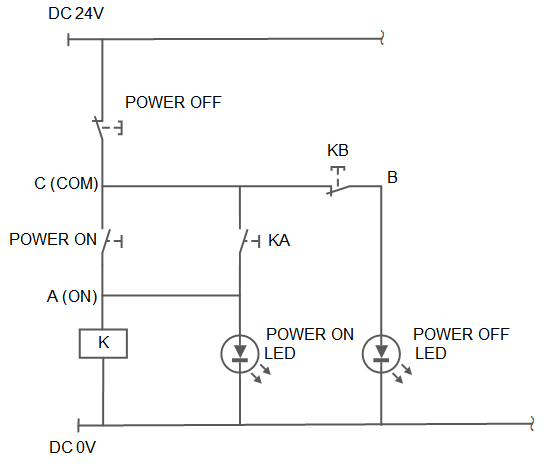
电源开关电气原理图
电源开关电气原理图是 WH308M 操作面板上的机床电源开关接口与机床电源开关之间的连接原理图。
电源开关电气原理图如下所示:
端口定义
Lambda 21B 端口及接线示意图如下:

信号类型
支持以下信号类型:
开关量输入信号
开关量输入信号示意图如下:
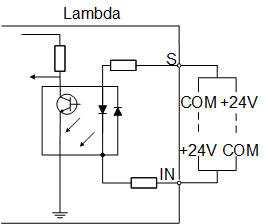
开关量输入信号可支持高/低电平输入有效:
- 接常开时,与 COM 导通表示接收信号。
- 接常闭时,与 COM 断开表示接收信号。
信号输入端支持高/低电平有效:
- 当 Lambda 控制器公共端 S 接 COM,输入端为高电平有效。
- 当 Lambda 控制器公共端 S 接 +24V,输入端为低电平有效。
继电器输出信号
Lambda 控制器的输出类型为继电器输出。
继电器触点带负载能力为 AC 250V/5A。可控制小功率的 220V 交流负载。若接大功率负载,可连接接触器,如下图所示:

模拟量输出信号
AVC 为 0 ~ 10V 的可控电压输出,外接变频器的模拟电压频率指令输入端。
通过改变电压来控制变频器的频率,从而控制主轴转速。

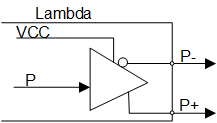
差分输出信号
控制驱动器运动的脉冲指令形式为脉冲+方向,负逻辑。最高脉冲频率 1MHz。
总线系统控制驱动器运动的指令为 M-II 指令,故无此信号。
差分信号脉冲指令输出指令类型如下图所示:
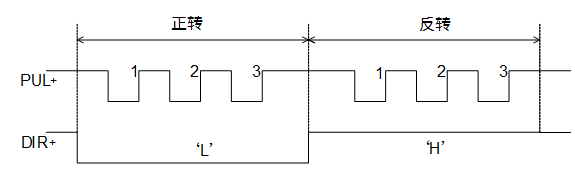
差分信号输出信号如下图所示:
接口定义
该部分介绍 Lambda 控制器的接口,NK530M 支持多种 Lambda,接口定义类似,以下以 Lambda 21B 为例介绍接口。
包括:
手轮接口
接口示意图及说明如下:

| 信号名称 | 说明 |
|---|---|
| +5V | 为手轮供电 |
| HA | 编码器A相信号 |
| HB | 编码器B相信号 |
| NC | 无信号连接 |
| HX1 | 选择X1倍率 |
| HX10 | 选择X10倍率 |
| HX100 | 选择X100倍率 |
| HSU | 选择4轴 |
| HSA | 选择5轴 |
| GND | 数字地 |
| HSB | 选择6轴 |
| HSZ | 选择Z轴 |
| HSY | 选择Y轴 |
| HSX | 选择X轴 |
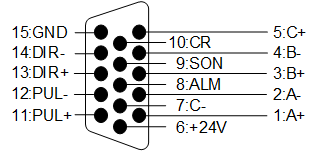
脉冲轴接口
接口示意图及说明如下:
| 信号名称 | 说明 |
|---|---|
| A+/A-/B+/B-/C+/C- | 编码器A相/B相/C相反馈信号输入。 差分信号传输方式。 接受来自驱动分频器(等效于RS422)的编码器信号(A相/B相/C相)的差分输出。 |
| ALM | 驱动器报警信号输入。 当驱动器检测到故障时,此输出(晶体管)切断。 |
| SON | 伺服ON信号输出。 此信号用于开启(通电状态)及关闭(非通电状态)伺服马达。当此信号连接到COM-时,动态制动器将释放,驱动器允许工作(伺服使能)。 |
| CLR | 驱动器报警清除信号输出。 此信号为解除警报状态/警告状态,只能解除有可解除属性的报警。 |
| PUL+/PUL- | 脉冲输出。 差分信号传输方式。 |
| DIR+/DIR- | 方向输出。 差分信号传输方式。 |
| +24V、GND | DC24V电源输出。 与驱动器连接。 |
MECHARTROLINK-II 接口
接口示意图及说明如下:

| 引脚编号 | 信号名称 | 说明 |
|---|---|---|
| 1 | M2_485_N | MECHARTROLINK-II(安川总线)的差分负信号 |
| 2 | M2_485_P | MECHARTROLINK-II(安川总线)的差分正信号 |
| 3~8 | - | 无信号连接 |
| 外壳 | GNDP | RJ45屏蔽壳接大地 |